-
ロボットのような動き!「robot」アニメーション制作【アニメ・モーションのつくりかた!】〜スプライトスタジオ編〜 part21
-
2017.12.12
-
投稿者: やじキチ
-
どうも!(・∀・)やじキチです。
イチから学ぶ!【アニメ・モーションのつくりかた!】〜スプライトスタジオ編〜の連載ブログです!
前回のpart20では、セルマップにパーツを追加するときの注意事項をまとめました。
今回はロボットのような、カクカクしたアニメーションを制作したいと思います!
目次
イチから学ぶ!【アニメ・モーションのつくりかた!】〜スプライトスタジオ編〜のPart21です!
セクション1:間隔が大切!大まかな動きの設定
今回は歩くアニメーション「walk」を、ロボットっぽく動かしてみようと思います。
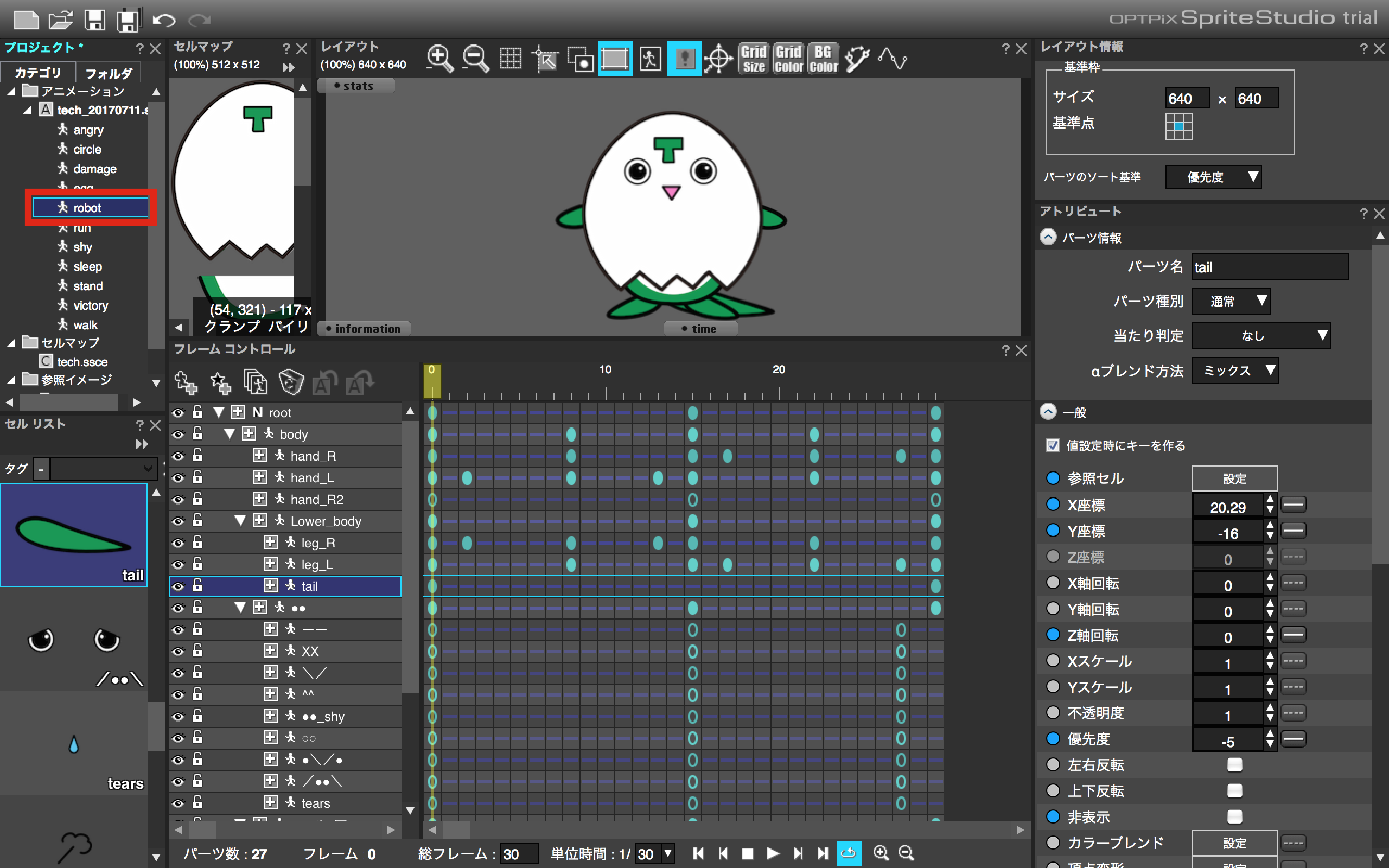
「walk」を複製して、「robot」を作成します。
今回は流用する部分が多いので、不要な箇所だけキーを削除します。
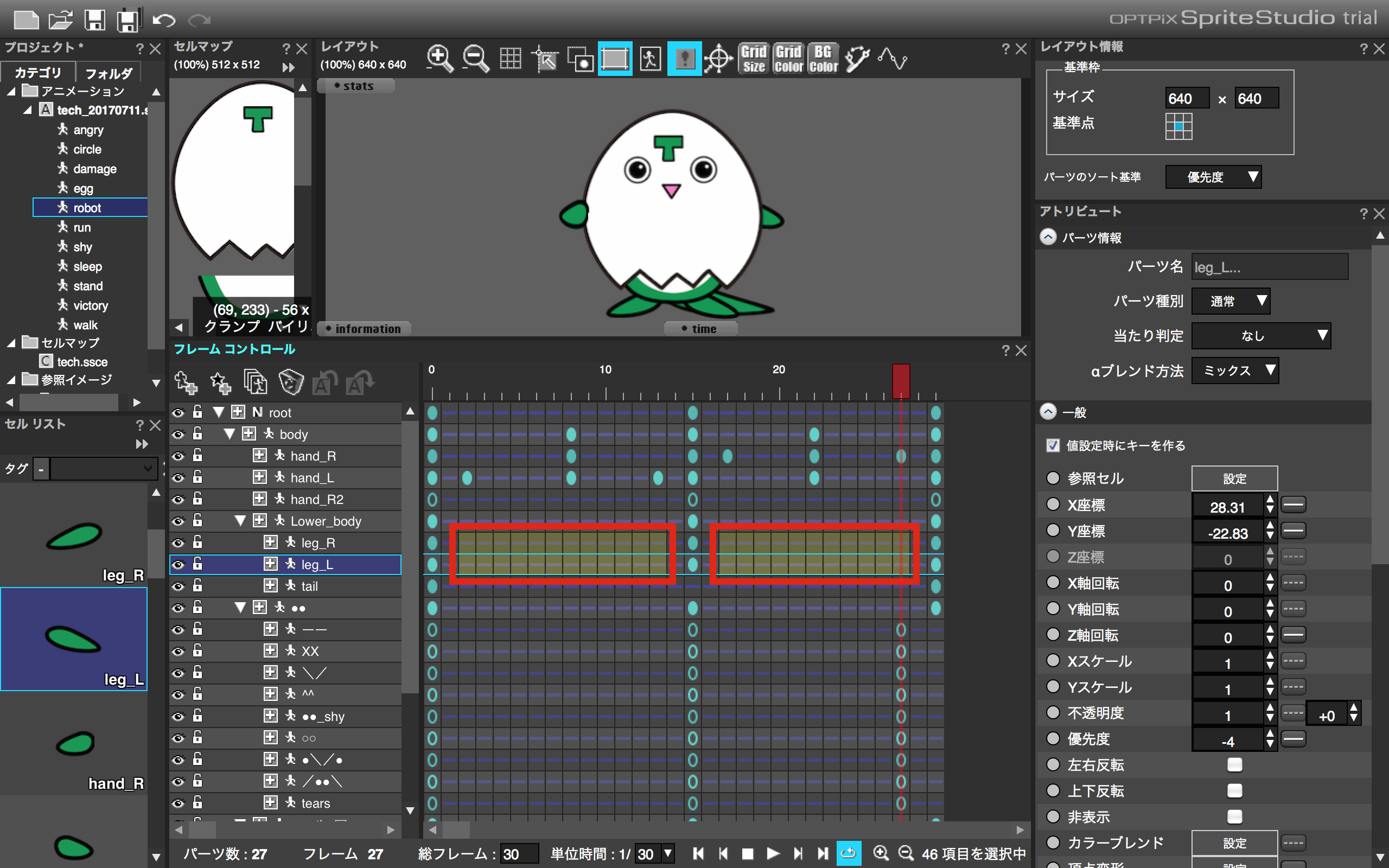
足の動きを変更しようと思うので、「leg_R」「leg_L」の一部だけ削除します。
ロボットの素早い動きの表現のために、現状のキーの間隔を調整します。
まずは手を前に出す8フレーム目のキーを、4フレーム目に移動します。
次に、手の戻しぎわの13フレーム目のキーを、6フレーム目に移動します。
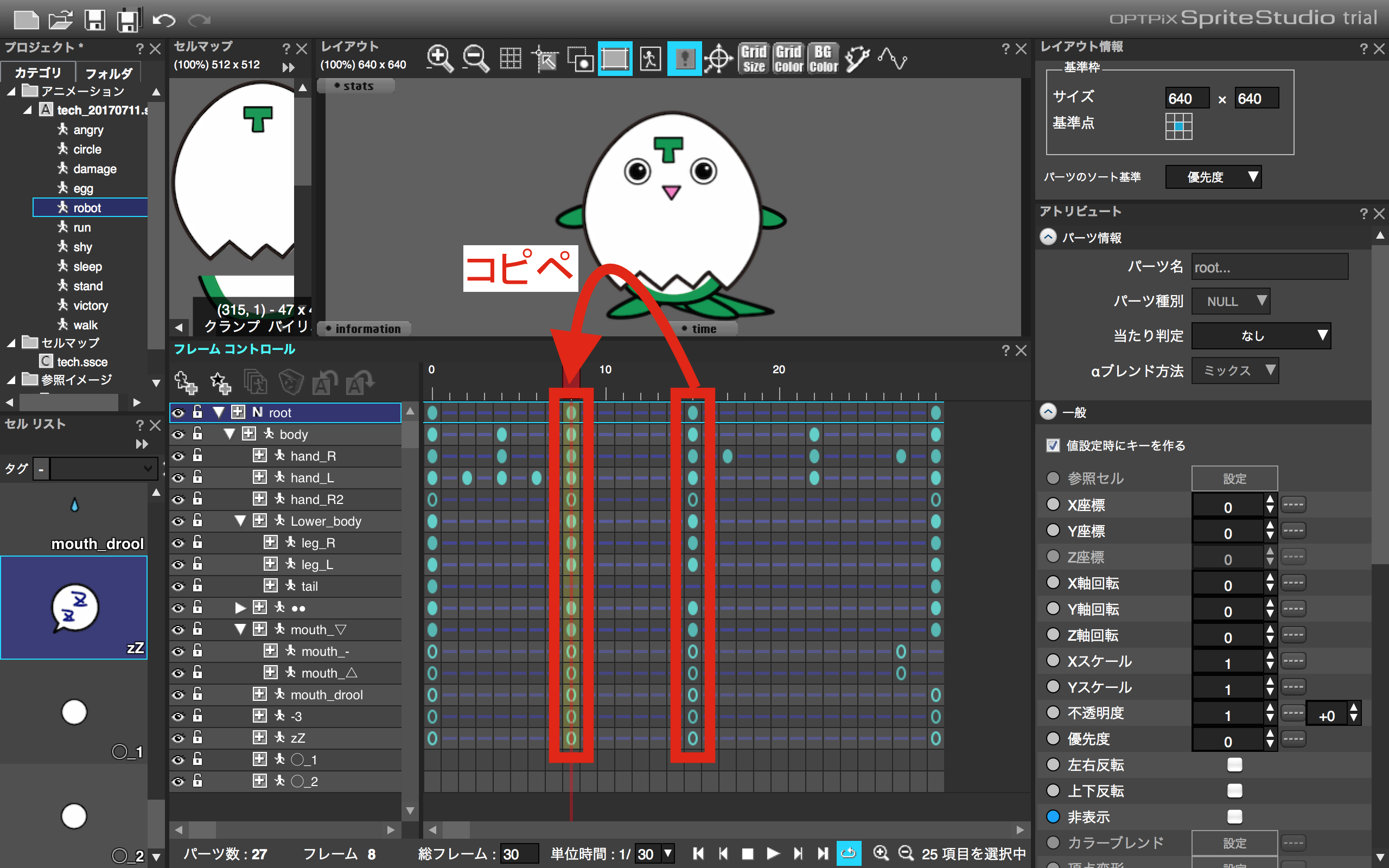
次に、15フレーム目のキーを8フレーム目にコピペします。
これで、8〜15フレームの間はてっくんの動きに変化がありません。
ロボットらしい動きは、「素早い動き」+「動きのつなぎ目がカクカク」で表現ができます。
この間隔を詰める作業と、間隔をあける作業を覚えておきましょう!
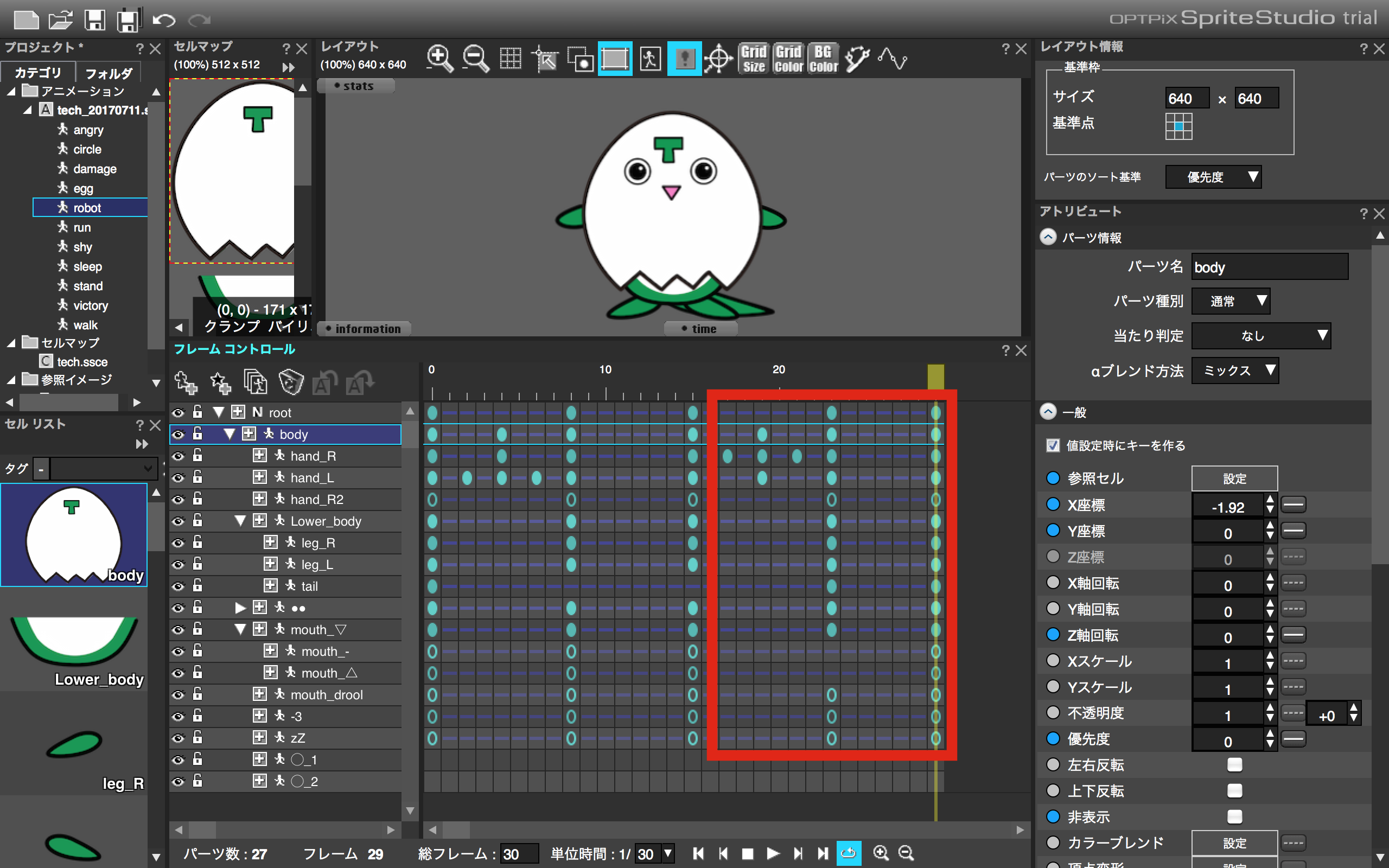
アニメーションの後半も同様に、間隔を調整します。
これで、大まかな動きは完了です!
セクション2:不自然な方がロボットらしい!足の動きの調整
「walk」の時は、形を変形して前に出ているように見せた方が「自然」に見えました。
しかし今回はロボットの動きを表現したいので、逆に「不自然」な動きの設定をします!
今回は、単純に足の角度を変更するだけにします!
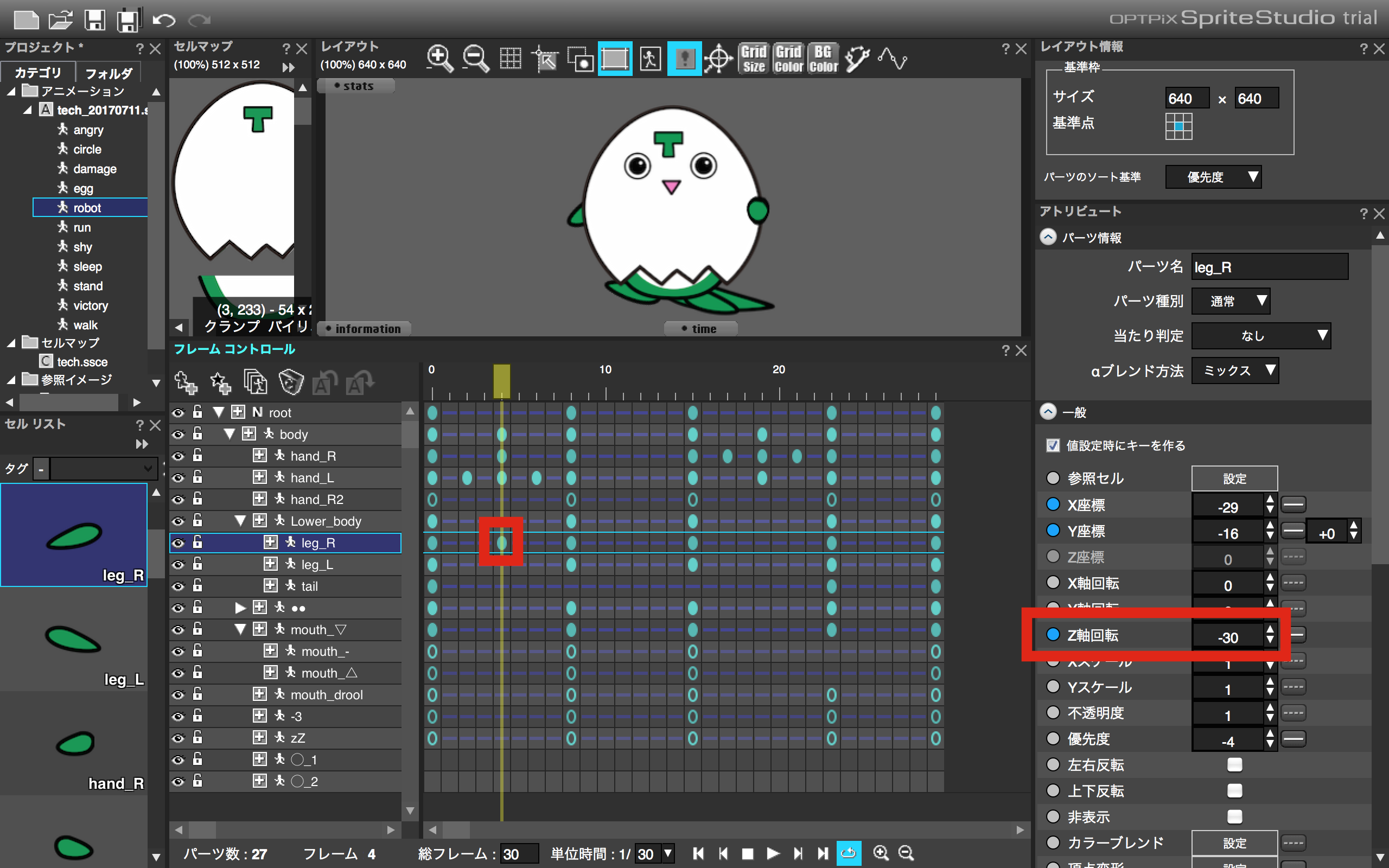
4フレーム目の「leg_R」の「Z軸回転」を−30に変更します。
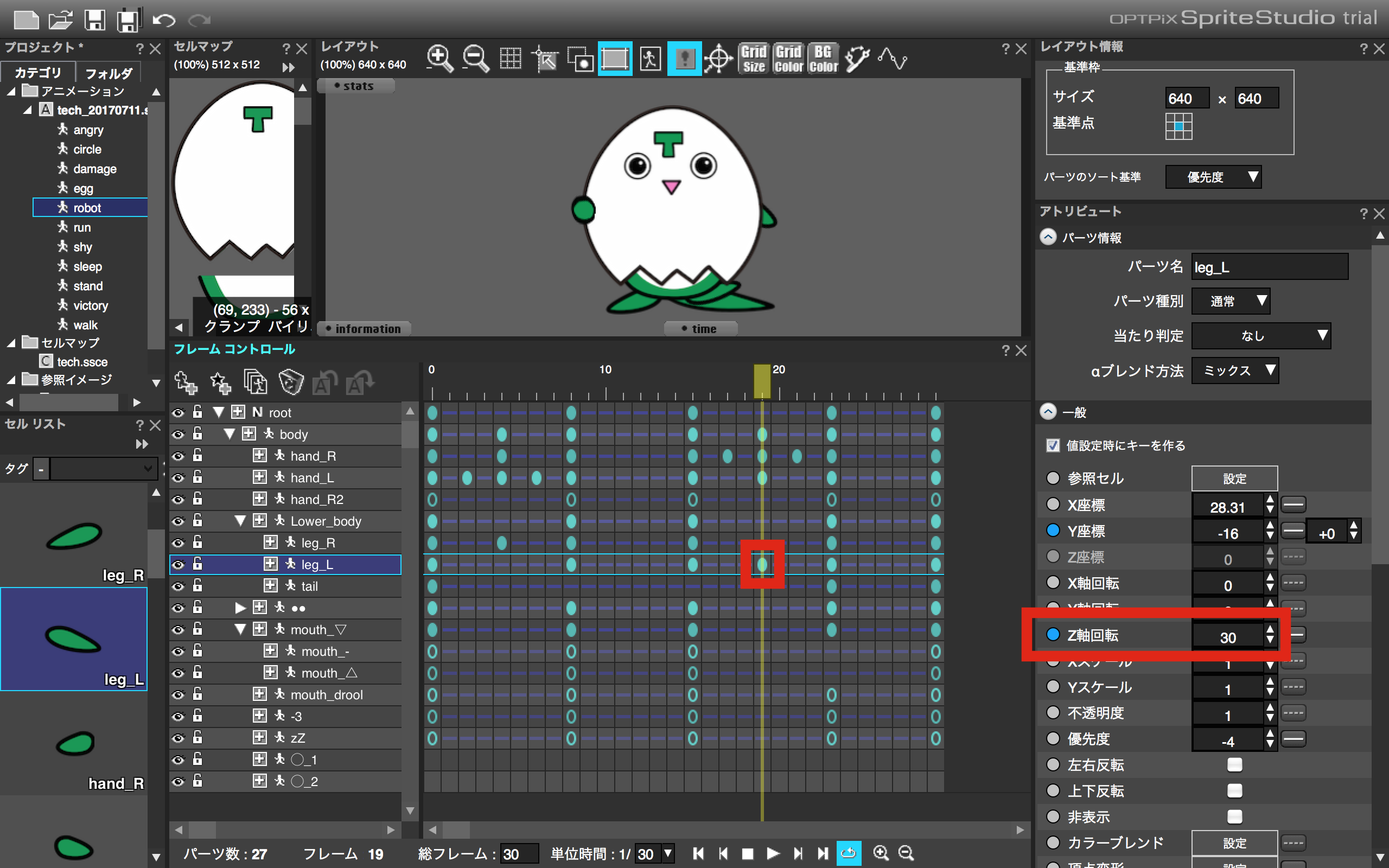
次に、19フレーム目の「leg_L」の「Z軸回転」を30に変更します。
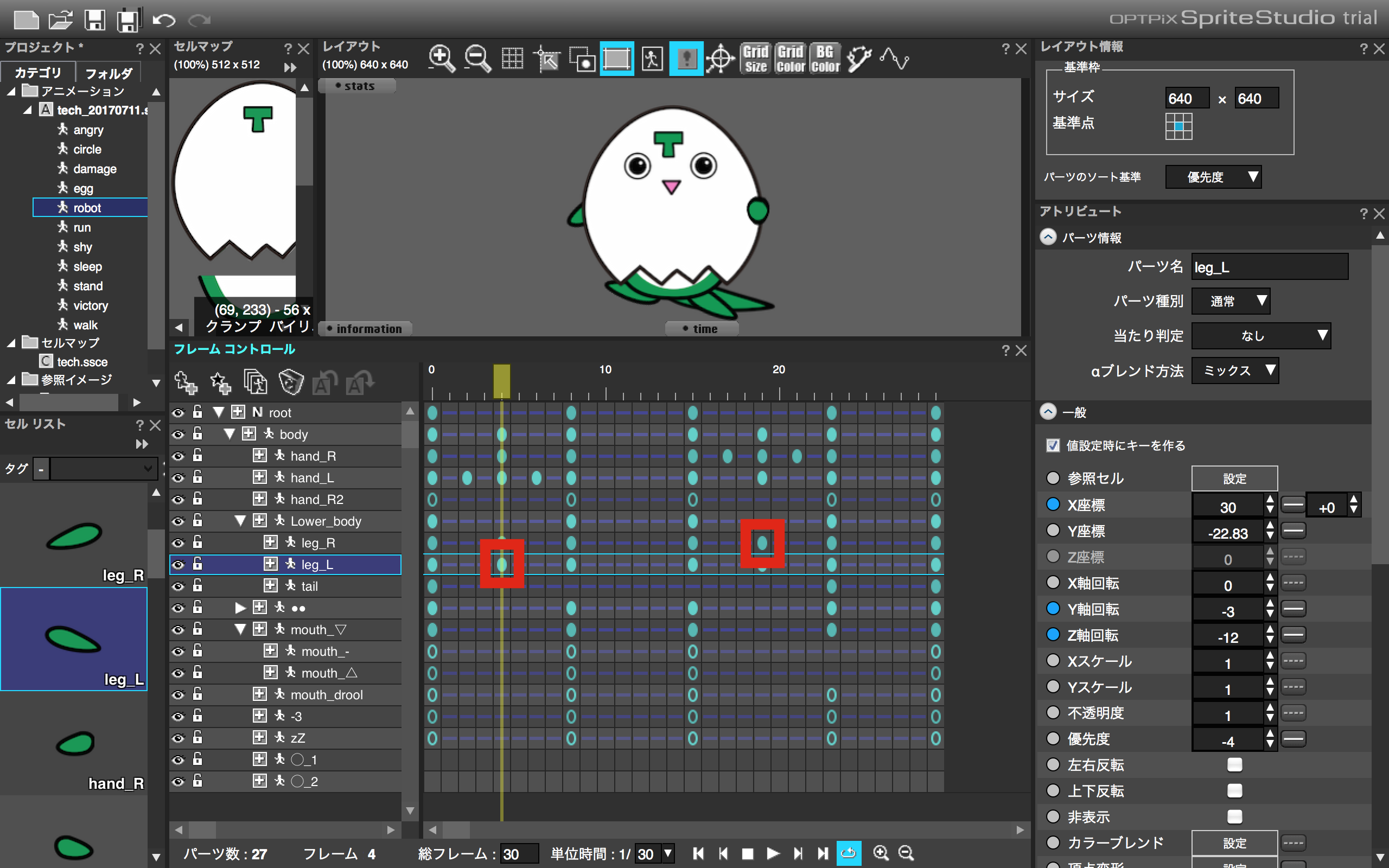
反対側の足は、地面を歩いているように見せるため、つま先が動かないよう位置を調整します。
いかがでしょうか!?
だいぶ動きがカクカクしてきたと思います^^
セクション3:最重要!微振動の表現!
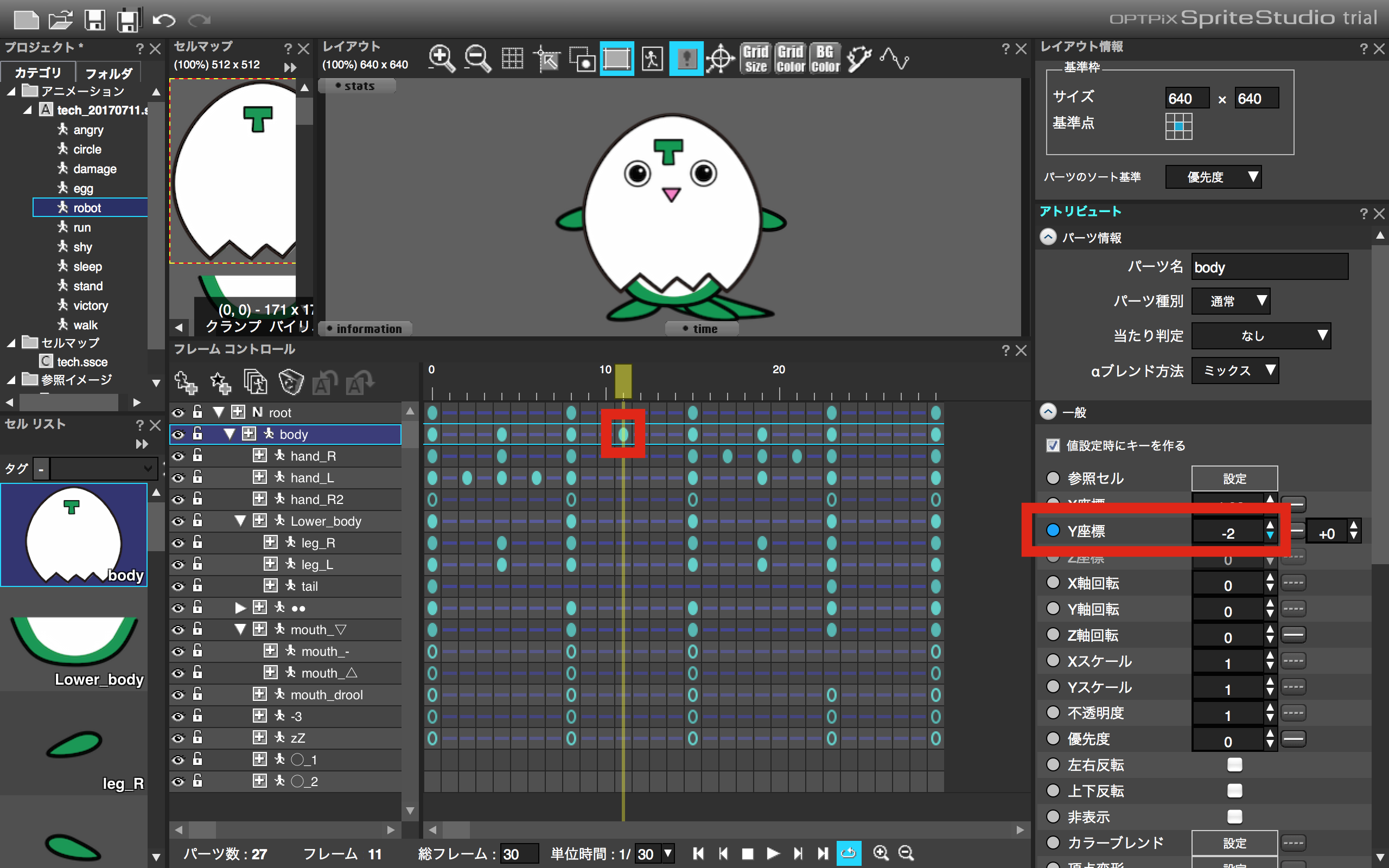
まずば体全体を揺らします!
「body」の11フレーム目の「Y座標」を0から−2に変更します。
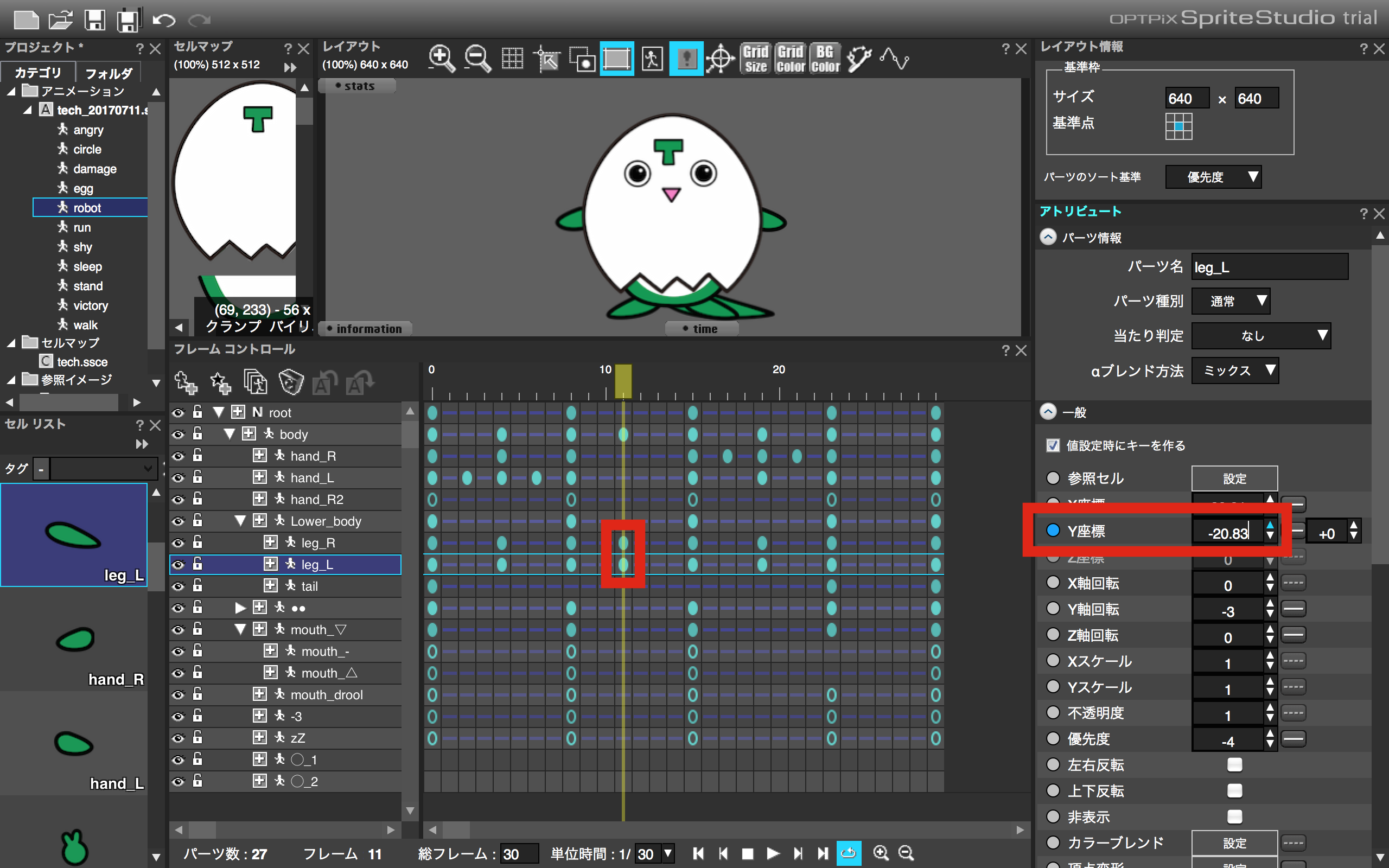
足は変化させたくないので、「leg_R」「leg_L」の11フレーム目の「Y座標」は、既存数値に+2で設定します。
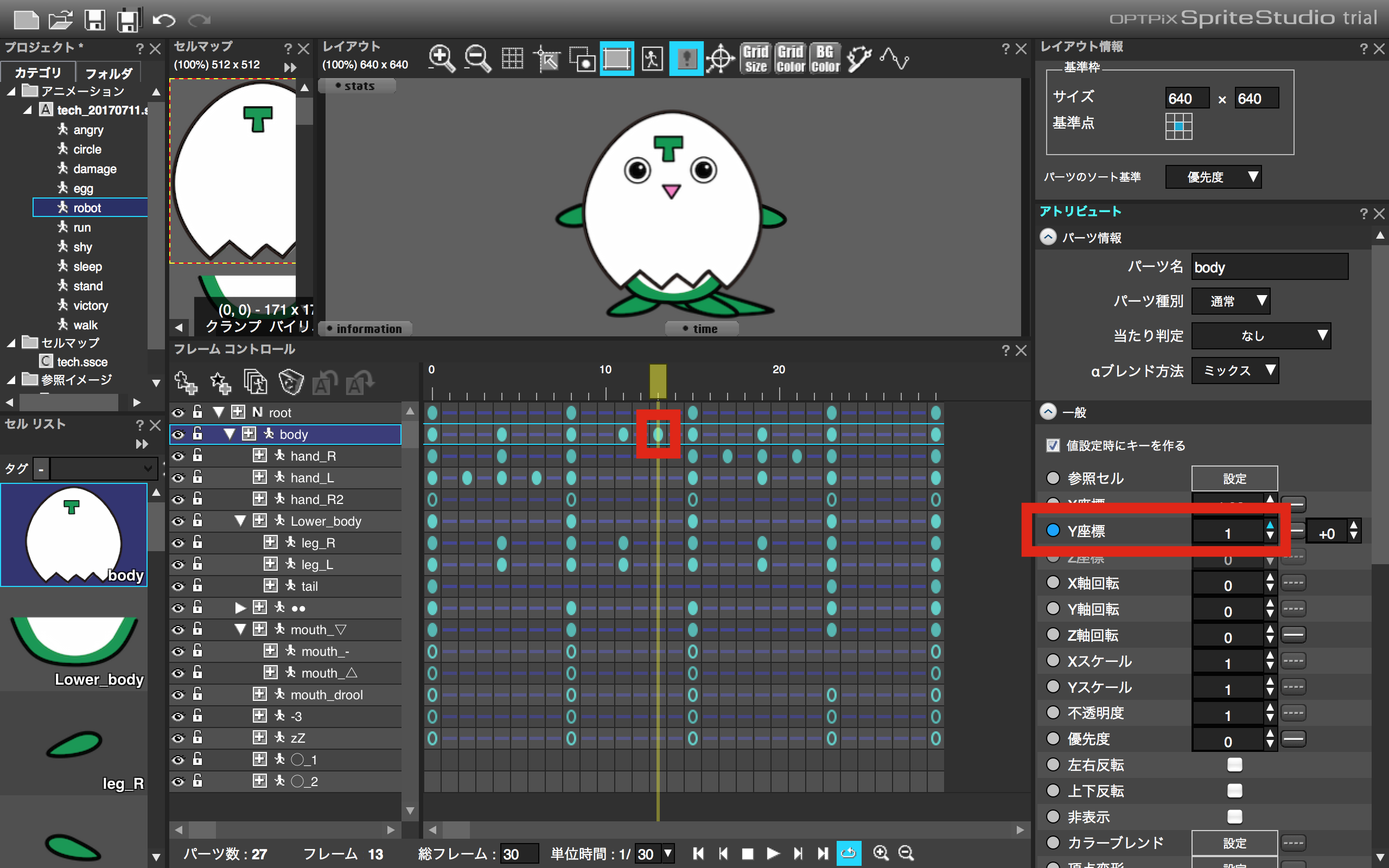
次に、「body」の13フレーム目の「Y座標」を0から+1に変更します。
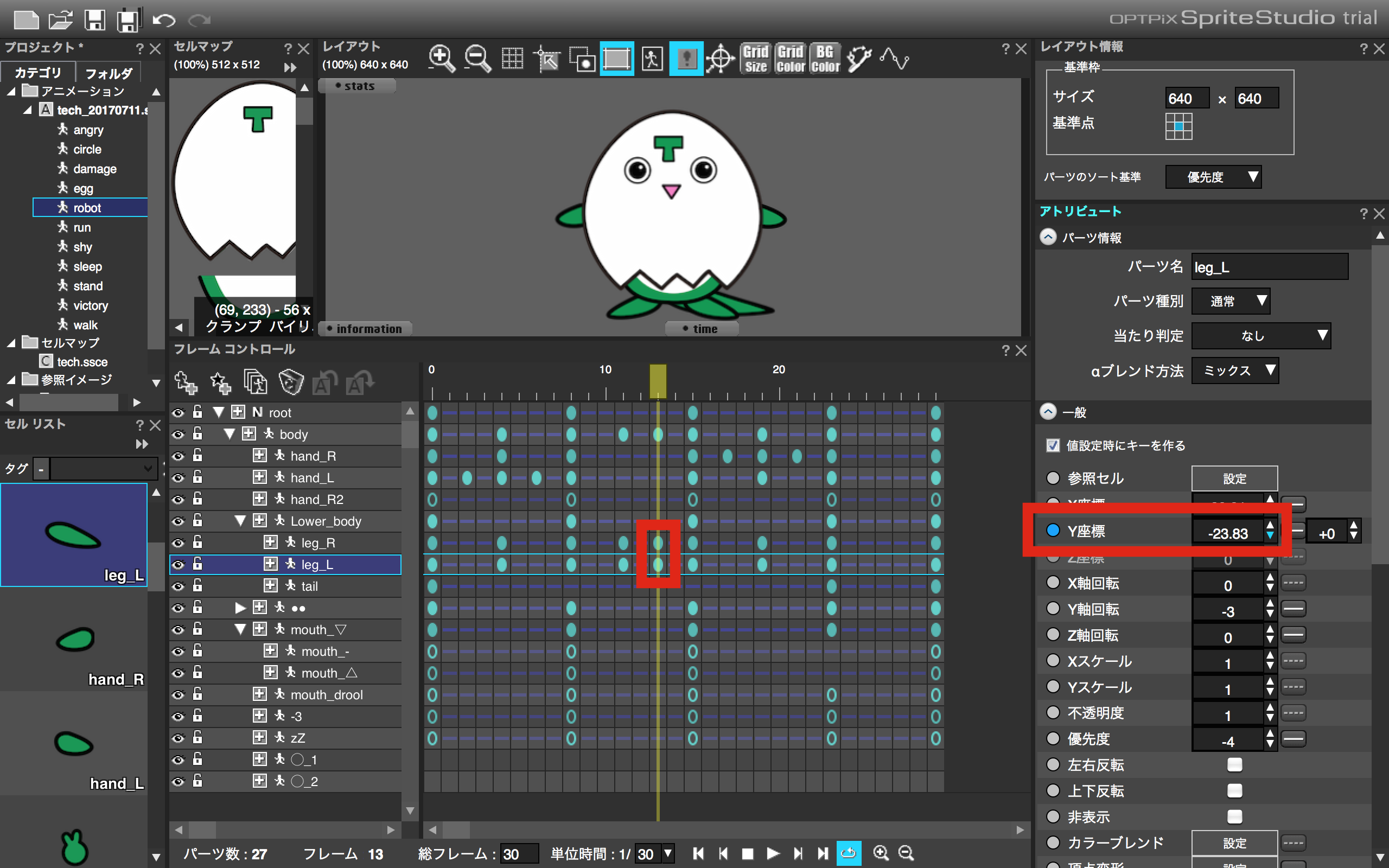
こちらも足は変化させたくないので、「leg_R」「leg_L」の13フレーム目の「Y座標」は、既存数値に-1で設定します。
後半にも同じ設定をしたのがこちら!
歩くたびに、上下に体が微妙に振動しているのがわかりますでしょうか?
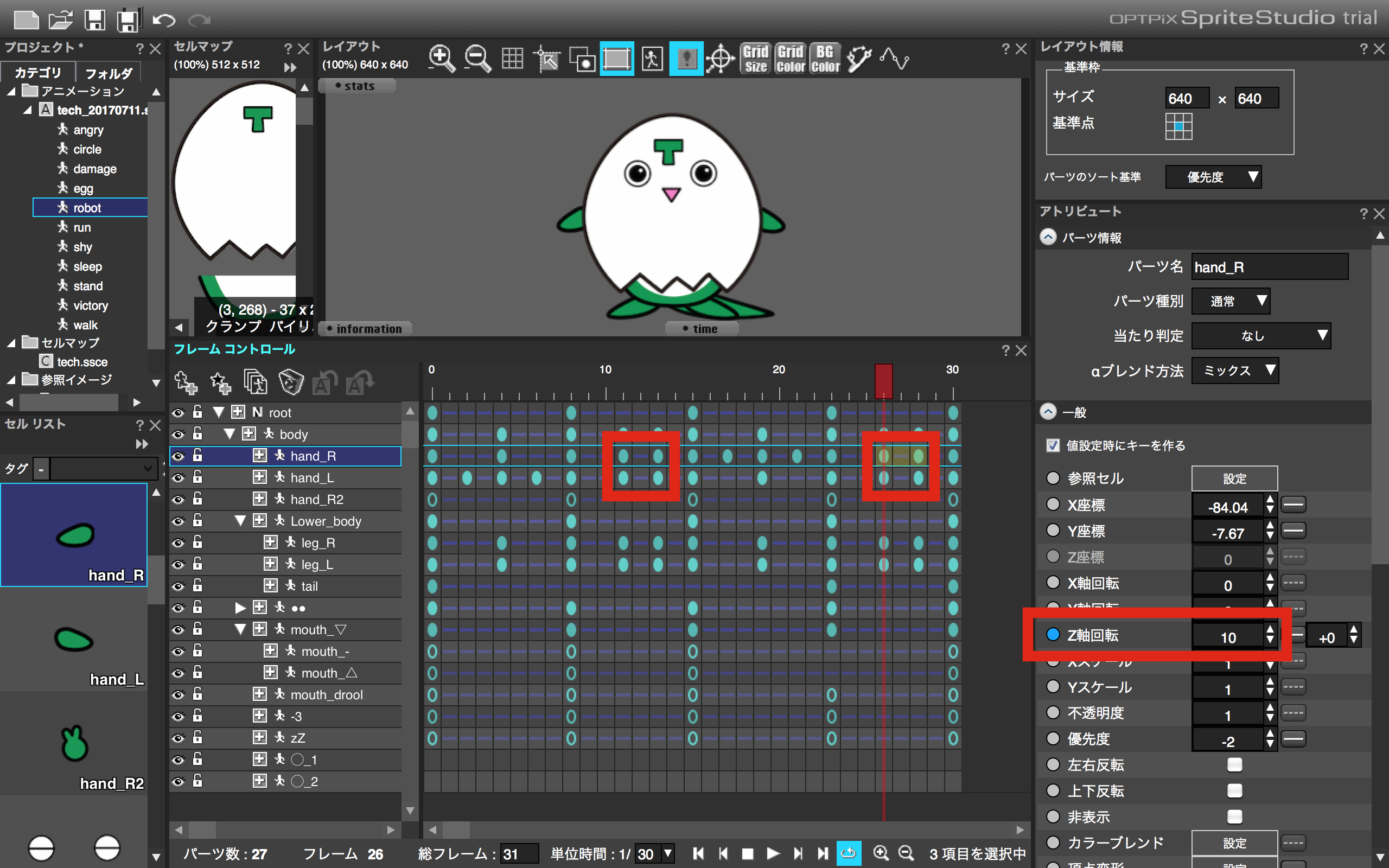
体だけだと表現が弱いので、振動を強調するために「hand_R」「hand_L」も振動させました。
腕パーツは「Z軸回転」で、上下の設定を行いましょう。
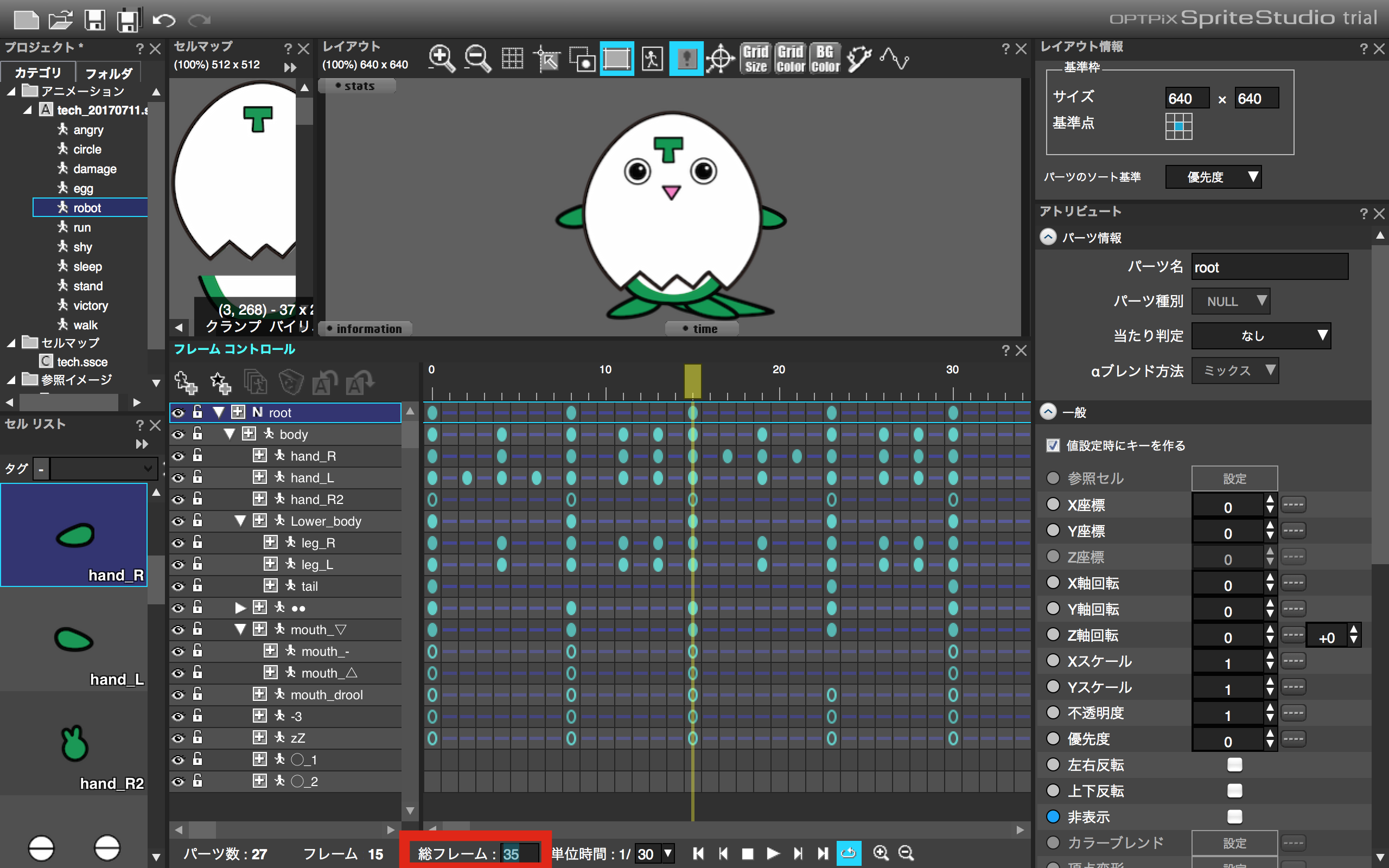
また、振動しないフレーム数を、変化をつけるためにもう少し増やしたいと思います。
総フレームを31から35に変更します。
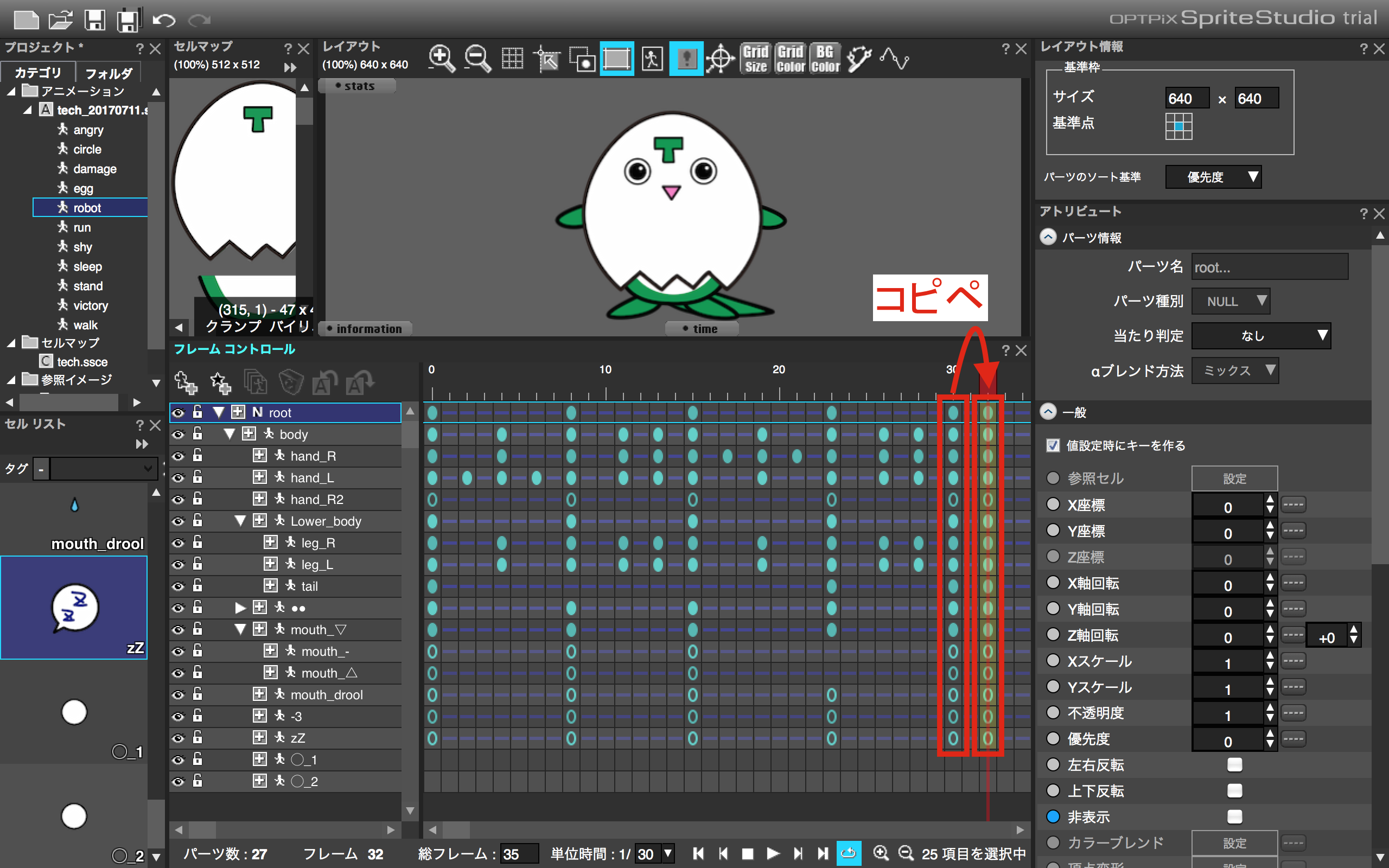
30フレーム目のキーを、一式32フレーム目のコピペします。
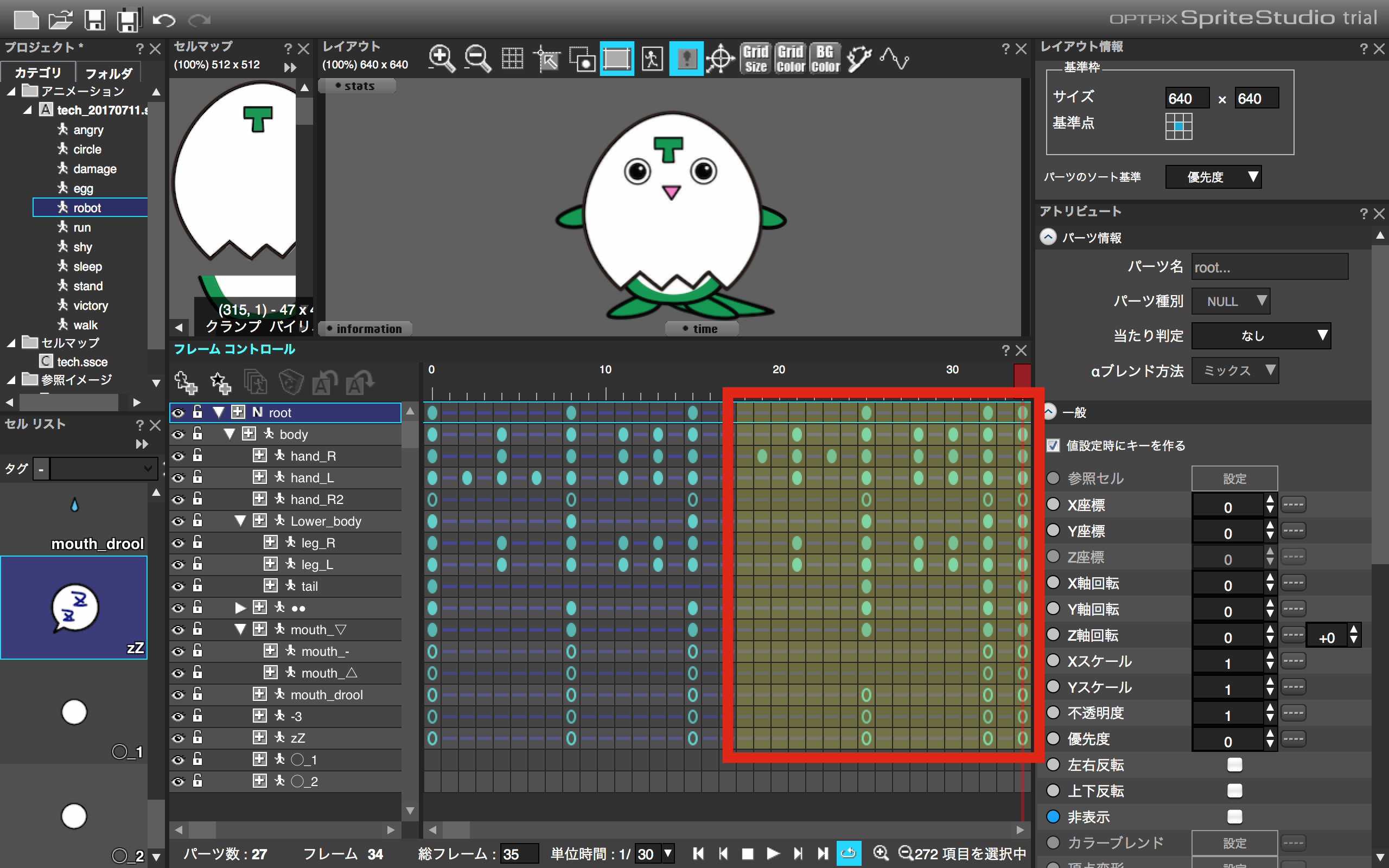
17〜32フレーム目のキーを、2フレーム横にずらします。
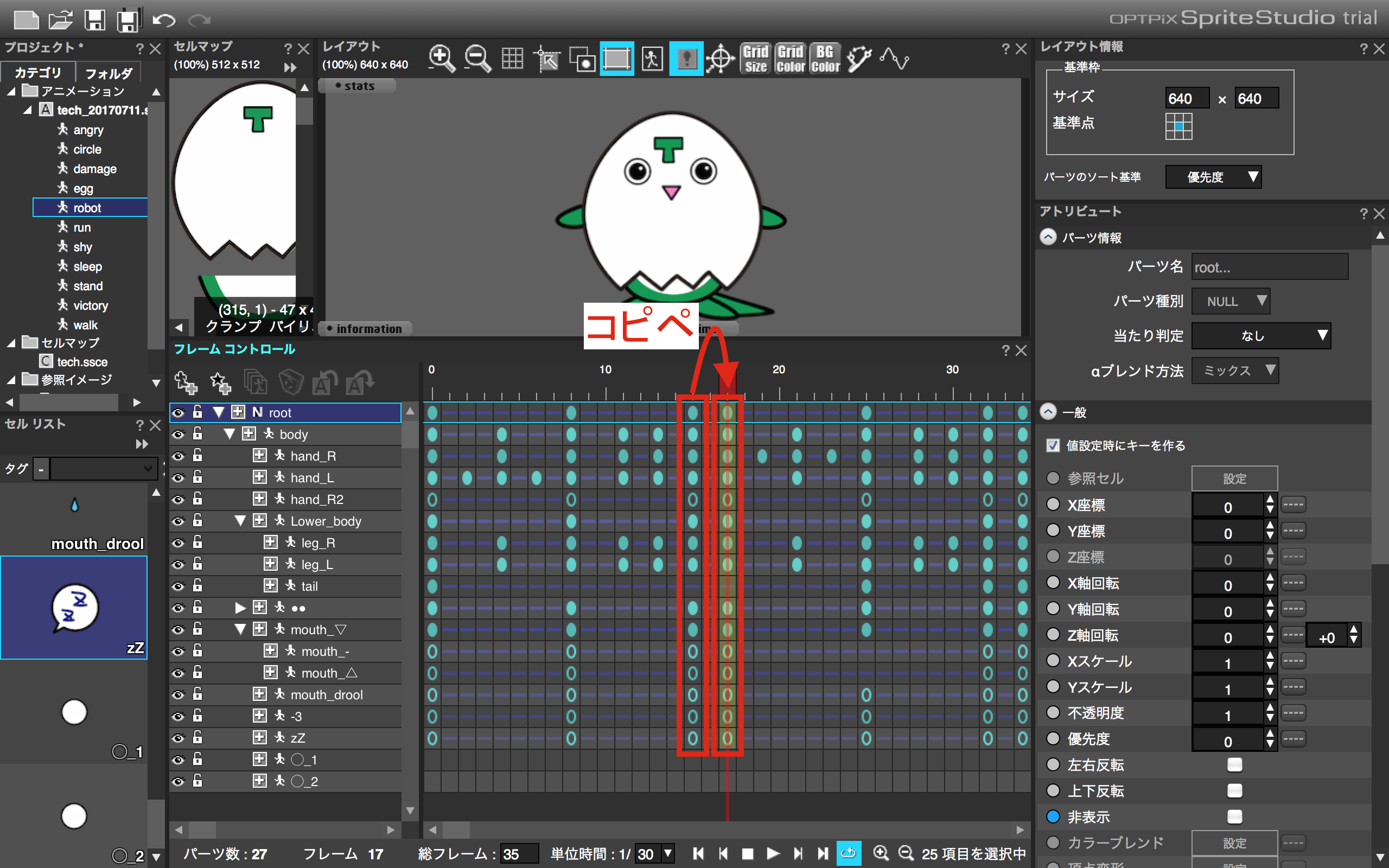
15フレーム目のキーを、一式17フレーム目のコピペします。
これで、振動しないアニメーション部分が2フレームずつ増えました!

動かしてみるとこんな感じ!
ロボットっぽくなってきました!
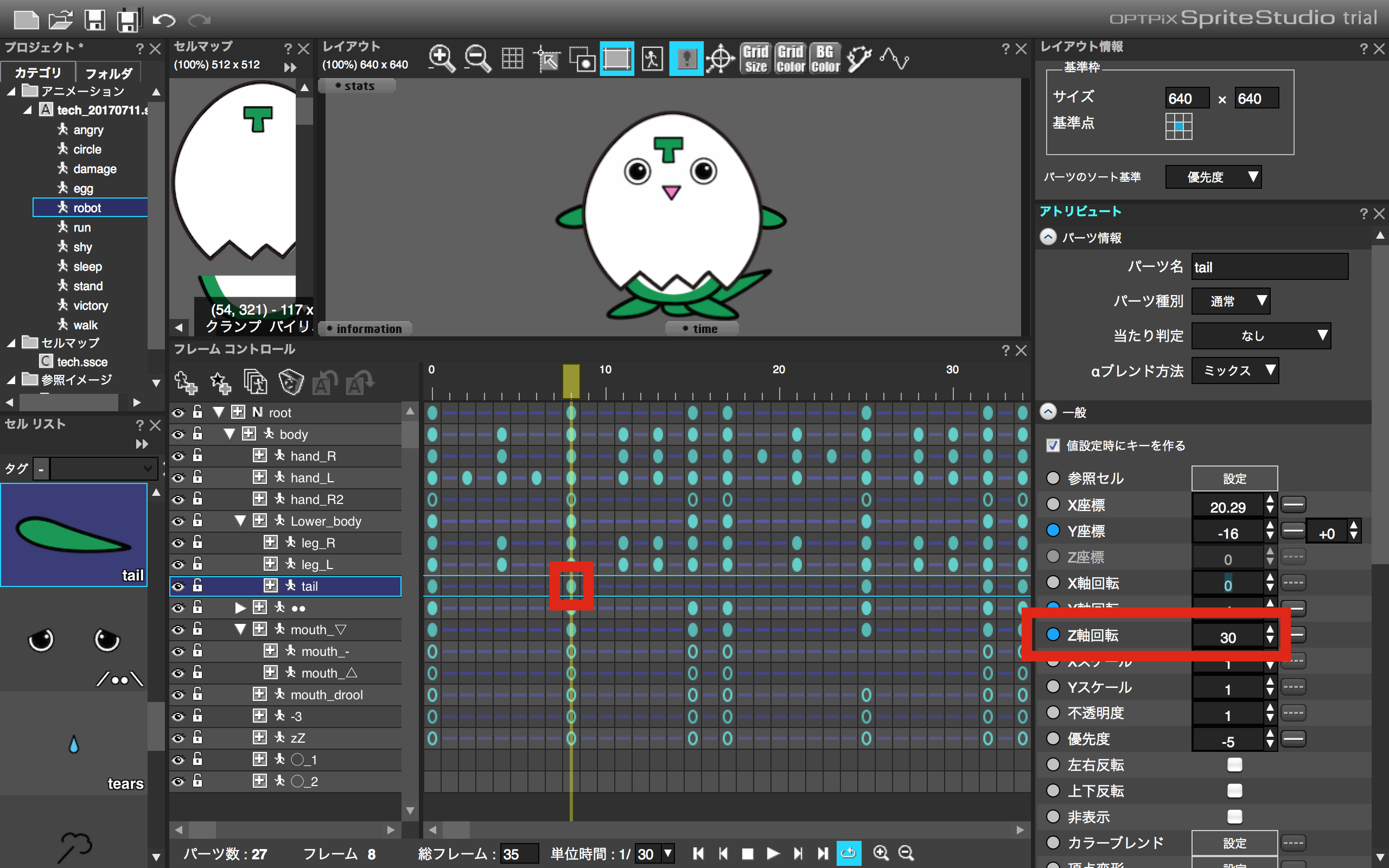
クオリティアップのために、尻尾にも動きと振動を加えましょう!
「tail」の8フレーム目の「Z軸回転」を0から30に変更します。
…と、なぜか尻尾の付け根が下の方に降りてきてしまいました…。
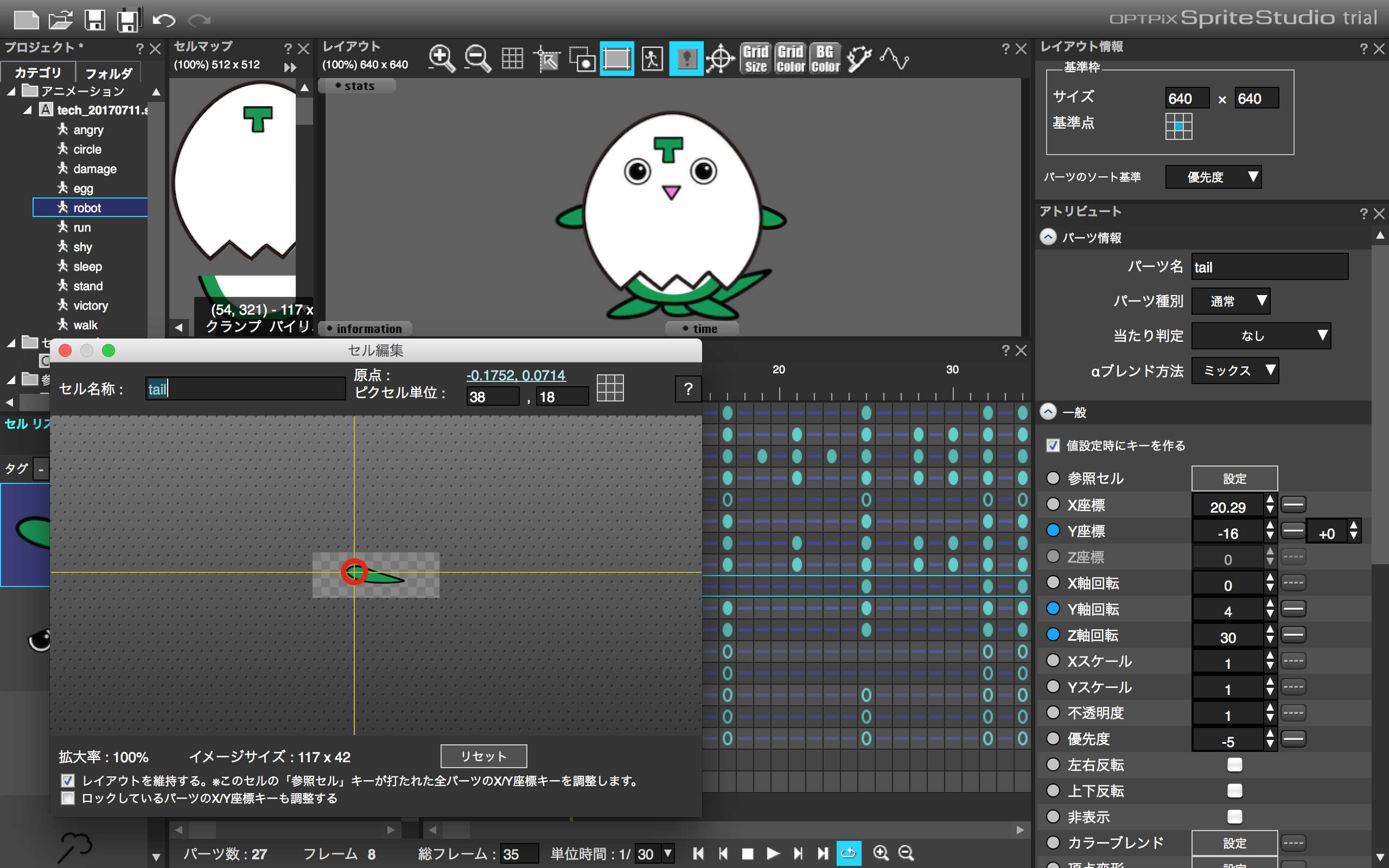
セルリストのパーツをクリックすると、角度の基準が確認できるのですが、ちゃんと付け根になっています。
おかしいですね…?^^;
原因がわかりませんでした…
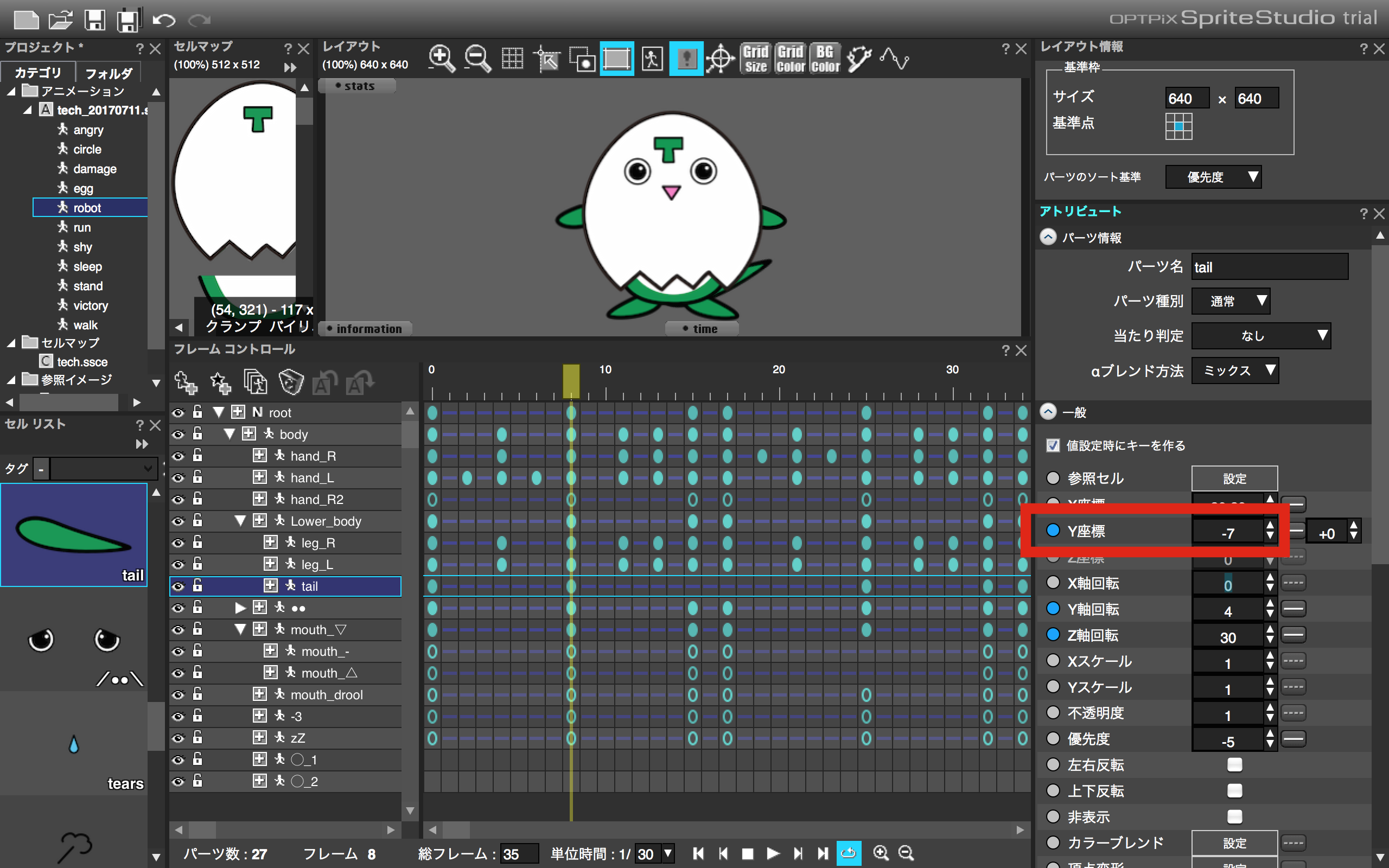
このズレは、「Y座標」を−16から−7に変更して調整します…!
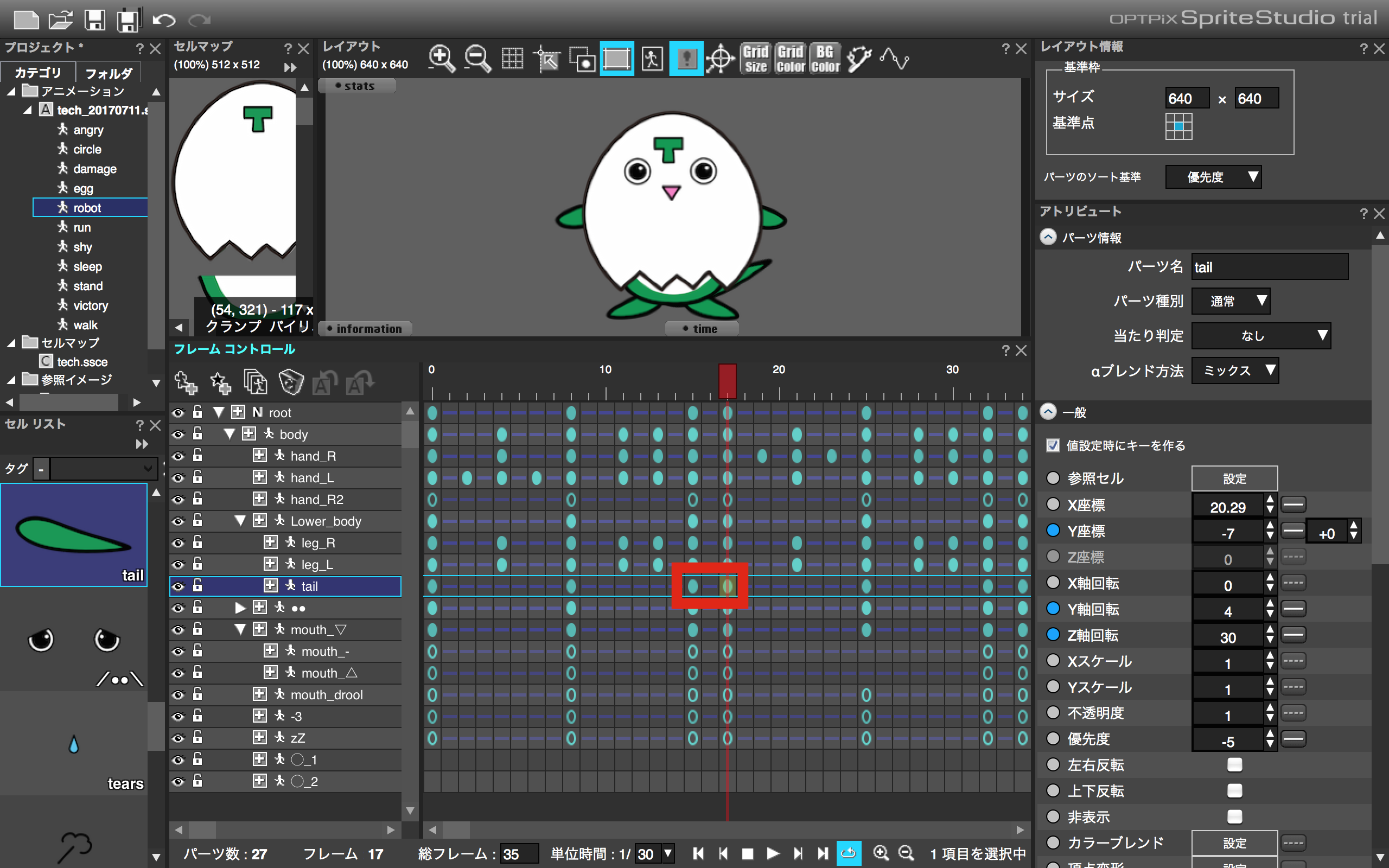
尻尾が変化しない15フレームと17フレームにキーを打ちます。
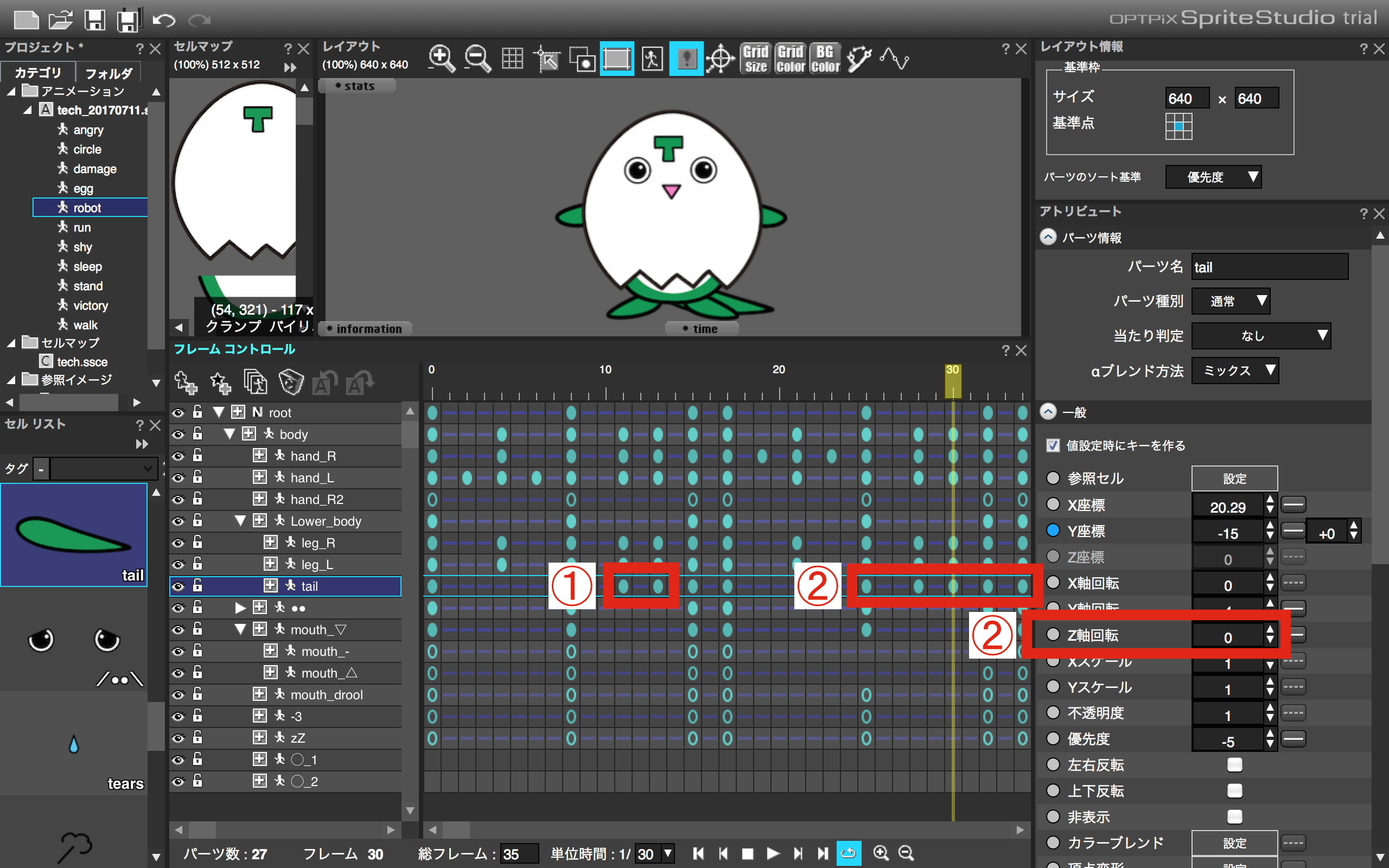
1)振動させるキーを設定します。
2)後半は、尻尾を30から0にもどします。
これで「robot」のアニメーションは完成です!!
並べてみるとこんな感じ!
てっくんは小さいキャラなので、少し動きが早く、振動も少なめです。
大きいキャラになった場合は、キーフレームの間隔を広げ、振動数を増やすとしっくりくると思います!
次回はふわふわ浮いてるアニメーションを説明いたします!
まとめ
・ロボットらしい動きは、「素早い動き」+「動きのつなぎ目がカクカク」で表現!
・ロボットらしい動きは、「不自然」さ!
・動きの区切りに微振動を設定!
ここまでで何か質問やコメントなどございましたら是非書き込んでください!
私も皆様と一緒に成長していきたいと思います!
次回もテクノブログにご期待くださいm(_ _)mThe following two tabs change content below.
やじキチ
どうも!(・∀・)やじキチです。 影が薄いのをカバーするためにチャラチャラしております。 常日頃から皆々様に笑顔でいて欲しいと思っております。 皆々様が笑顔で、世界が平和なら最高です! よろしくお願い申し上げます!
最新記事 by やじキチ (全て見る)
- 【再掲載】やじキチはよくカップ麺たべるし、チャックフィンリーがラーメン日記をやるから、やじキチはカップ麺レポやったら? - 2020年2月5日
- 読書の秋!漫画好きが語る週刊少年ジャンプのオススメ漫画5選!!!!! - 2019年9月19日
- 【再掲載】40分だけ部長を体験してみた。 - 2019年6月28日